

Os robôs feitos com materiais flexíveis podem imitar melhor a aparência, os movimentos e as habilidades de humanos e animais.
Os robôs macios imitam os sistemas biológicos para se adaptarem a ambientes imprevisíveis. Feitos de polímeros leves e deformáveis, eles suportam seu próprio peso apesar das formas flexíveis.
No entanto, a produção em massa tem sido um desafio, devido aos altos custos e à complexidade da fabricação. Buscando uma solução em escala, pesquisadores da Universidade de Coimbra integraram atuadores macios a um exoesqueleto. Seu projeto, publicado na Cyborg and Bionic Systems, combina suavidade com suporte estrutural.
“A maioria dos robôs é feita de materiais rígidos”, disse Pedro Neto, um dos pesquisadores que conduziram o estudo, em uma entrevista à mídia especializada Tech Xplore.
“Ainda assim, quando observamos os animais, notamos que seus corpos podem ser compostos de partes duras (esqueletos) e partes moles (como os músculos). Alguns animais, como as minhocas, têm o corpo totalmente mole. Inspirando-nos na natureza, prevemos que a próxima geração de robôs incorporará componentes feitos de materiais macios ou, em alguns casos, poderá ter um corpo totalmente macio.”
"Ao contrário dos robôs rígidos, os sistemas robóticos macios apresentam menos risco de danos em caso de colisão com humanos, animais ou objetos. Seus materiais flexíveis os tornam mais seguros para coexistir em espaços internos e externos compartilhados. Os impactos com robôs flexíveis provavelmente causariam poucos danos ou lesões.
Mão robótica
Neto e seus colegas tinham como objetivo criar uma mão robótica macia, acessível e segura para permitir uma adoção mais ampla. Um modelo escalável, porém suave, poderia catalisar novas pesquisas e inovações em robótica. Seu trabalho se concentrou em superar as barreiras à produção em larga escala.
“Usamos a análise de elementos finitos para otimizar o design antes de fabricar fisicamente a mão, o que reduziu os custos de prototipagem”, explicou Neto. “O uso da impressão 3D convencional se mostrou eficaz ao imprimir diretamente alguns componentes em materiais macios e moldes em materiais rígidos.”
A equipe de Neto projetou sua mão robótica macia com uma mistura de materiais para imitar as mãos humanas. Eles projetaram a estrutura para combinar com a aparência, o movimento e a capacidade da mão humana. A construção cuidadosa teve como objetivo imitar os movimentos e a destreza das mãos.

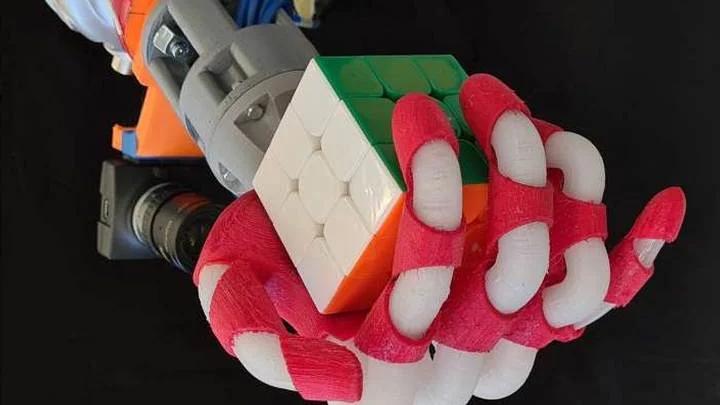
“A configuração da mão robótica consiste em cinco atuadores macios, cada um correspondendo a um dedo, e um exoesqueleto para promover a flexibilidade dos dedos”, disse Neto. “Um controlador ON-OFF mantém os ângulos de flexão especificados dos dedos, permitindo que a mão agarre efetivamente objetos de várias formas, pesos e dimensões.”
Os pesquisadores testaram sua mão robótica por meio de simulações e experimentos. Até o momento, os resultados são promissores. A mão agarrou com sucesso vários objetos de diferentes formas, pesos e tamanhos nos testes iniciais. As diversas capacidades de preensão indicam um bom desempenho inicial.
“A principal contribuição é o sistema integrado de projeto e fabricação que usa análise de elementos finitos para otimizar o projeto antes da fabricação”, disse Neto. “Essa conquista tem o potencial de aumentar a acessibilidade das mãos robóticas macias, reduzindo os custos e eliminando os procedimentos de projeto e fabricação que geralmente consomem muito tempo e recursos.”
Olhando para o futuro, essa mão robótica macia pode potencializar novas pesquisas e aplicações. Os roboticistas acadêmicos e independentes podem aproveitá-la para avaliar a IA e os métodos computacionais para o avanço das capacidades dos robôs.
O design acessível também abre potencial para robôs humanoides acessíveis e com assistência humana. Ao enfrentar os desafios de escalabilidade, a inovação da equipe pode ajudar a ampliar o desenvolvimento e a adoção da robótica flexível.



{kind=link}