

As chuvas de partículas resultantes das colisões de raios cósmicos com a atmosfera terrestre têm proporcionado uma potencial solução para a navegação subterrânea viável.
Os múons provenientes dos raios cósmicos que precipitam sobre a superfície e penetram parcialmente na crosta terrestre têm permitido aos pesquisadores determinar a localização precisa de um indivíduo no interior de um edifício, em um ambiente onde os sistemas de posicionamento global por satélite se mostram ineficazes.
Este avanço representa um marco significativo no desenvolvimento de um sistema de navegação eficiente em ambientes subterrâneos, subaquáticos e em regiões de altas latitudes, nos quais o GPS apresenta limitações.
Conforme indicado pelos responsáveis por sua concepção, essa tecnologia poderia ser aplicada em diversas áreas, tais como operações de busca e resgate, monitoramento submarino, rastreamento em áreas de interferência de sinais de rádio e atividades de mineração.
“Os múons dos raios cósmicos caem de forma igual em toda a Terra e sempre se deslocam com a mesma velocidade, independentemente da matéria pela qual atravessam, penetrando até mesmo quilômetros de rocha”, afirma o físico Hiroyuki Tanaka, da Universidade de Tóquio, no Japão.
"“Agora, utilizando os múons, desenvolvemos um novo tipo de GPS, que chamamos de sistema de posicionamento muométrico (muPS), capaz de operar em ambientes subterrâneos, internos e subaquáticos.”
O Sistema de Posicionamento Global (GPS) opera por meio de uma técnica denominada trilateração. Os satélites GPS circundam a Terra, transmitindo sinais por meio de ondas de rádio. Um receptor, como um telefone celular ou o GPS de um veículo, é capaz de captar esses sinais.
O intervalo de tempo entre o envio e a recepção do sinal permite calcular a distância entre o satélite e o receptor. Ao obter múltiplas distâncias e analisar as diferenças entre elas, é possível determinar a localização precisa do receptor. Esse processo é comparável à ecolocalização. Assim, obtém-se a posição geográfica desejada.
No entanto, as ondas de rádio são uma forma de radiação eletromagnética que pode ser facilmente obstruída. É perceptível, por exemplo, quando o rádio do veículo perde o sinal ao passar por um túnel.
As ondas portadoras utilizadas pelo sistema GPS via satélite encontram obstáculos significativos ao tentar penetrar em rochas, água, paredes ou vegetação densa.
- Veja também: Potencial De Luminescência De Átomos Ausentes
Adicionalmente, a funcionalidade do GPS é comprometida em regiões de altas latitudes, uma vez que não há satélites GPS que orbitem diretamente sobre os polos terrestres, resultando em uma cobertura inadequada em determinadas latitudes.
Durante alguns anos, o professor Tanaka e seus colaboradores têm dedicado esforços à investigação do potencial uso dos múons de raios cósmicos como uma alternativa aos sinais de GPS provenientes de satélites.
Os múons são partículas subatômicas geradas por colisões de raios cósmicos oriundos de fontes como supernovas distantes ou o Sol com partículas presentes na atmosfera terrestre, e podem ser encontrados praticamente em todos os lugares.
Estima-se que a cada minuto, ou até mesmo com uma frequência maior, um múon atinja cada centímetro quadrado da superfície terrestre.
Os múons viajam quase à velocidade da luz e possuem a capacidade de penetrar profundamente no subsolo (sendo inofensivos; é provável que estejam atravessando você neste momento).
Essas partículas têm sido utilizadas de forma eficaz em técnicas de imagens de raios-X, como na análise de estruturas piramidais. No entanto, a capacidade dos múons de penetrar em regiões onde a luz não consegue alcançar despertou o interesse dos cientistas em explorar seu potencial para fins de navegação.
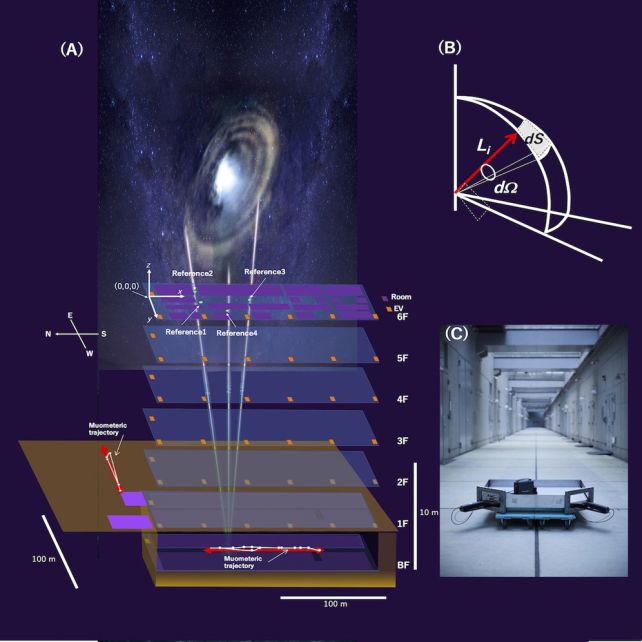
A concepção é bastante semelhante ao funcionamento do GPS convencional. Quatro estações de referência, responsáveis pela detecção dos múons, são instaladas acima do solo, enquanto o receptor de detecção é colocado em uma pessoa ou em um ambiente subterrâneo.
O sistema muométrico de posicionamento (muPS) foi inicialmente desenvolvido para detectar como a atividade vulcânica ou os movimentos tectônicos afetam o fundo do mar, por exemplo.
Conforme ocorre a queda dos múons, eles inicialmente atravessam os detectores de referência antes de alcançarem o receptor. Através da análise dos intervalos de tempo entre os detectores de referência e o receptor, é possível realizar a trilateração e obter as coordenadas do receptor.
Entretanto, o primeiro sistema muométrico de posicionamento (muPS) exigia uma conexão cabeada, o que se mostrava pouco prático para indivíduos em movimento. Agora, a equipe de pesquisa evoluiu para um sistema sem fio.
Os detectores de referência e o receptor foram todos sincronizados por meio de um relógio de quartzo de alta precisão.
Um dos detectores de referência foi posicionado no sexto andar de um edifício, enquanto uma pessoa portando o receptor se deslocava no subsolo. Essa nova abordagem é conhecida como sistema muométrico de navegação sem fio (MuWNS).
iScience , 2023)
Ainda não se alcançou a capacidade de rastrear as coordenadas do receptor em tempo real.
A equipe realizou medições e utilizou-as para reconstruir a trajetória percorrida pela pessoa ao longo dos corredores do subsolo. Embora tenham obtido resultados com uma precisão razoável, Tanaki afirma que ainda há espaço para melhorias.
A precisão atual do sistema MuWNS varia entre 2 metros e 25 metros (6,5 a 82 pés), com uma faixa de alcance de até 100 metros, dependendo da profundidade e velocidade do deslocamento da pessoa.
Conforme explica, isso equivale ou até mesmo supera a precisão de posicionamento do GPS de ponto único em áreas urbanas acima do solo.
- Veja também: Um Reator De Fusão Compacto Atingiu Um Grande Marco
“No entanto, ainda estamos distantes de alcançar um nível prático. As pessoas necessitam de uma precisão de 1 metro, e a chave para isso é a sincronização de tempo”, ele explica.
Em termos mais precisos, é necessário contar com relógios de maior qualidade, como os relógios atômicos de chip em escala micro que empregam transições regulares dos átomos de césio, cujos estados de energia são modificados.
Atualmente, esses relógios apresentam um custo elevado, podendo não ser viáveis economicamente. Contudo, a equipe de pesquisa almeja desenvolver esforços para reduzir o tamanho do restante do equipamento, de forma a torná-lo portátil e de fácil manipulação.
“Com esses novos resultados”, escrevem eles em seu artigo, “fica claro que, com melhorias adicionais, o MuWNS pode ser adaptado para aprimorar a navegação autônoma de robôs móveis, o posicionamento e outras aplicações práticas em ambientes subterrâneos e subaquáticos.”
A pesquisa foi publicada na iScience.


